 |
Introduction
à la robotique mobile
GLO-4001/GLO-7021
Automne 2017 |
 |
Mis à jour le 4 décembre 2017.
Description sommaire
Ce cours offre un aperçu des principes généraux de la robotique mobile ainsi qu'un tour d'horizon des principaux défis. La pierre angulaire du cours sera le traitement de l'information captée en tenant compte de l'incertitude, afin d'avoir une abstraction du robot et de son environnement adaptée à la tâche à effectuer. Les composantes de bases utilisés en robotique mobile, tels que les actionneurs et les capteurs (sonar, laser, caméras, et centrale inertielle), seront présentées afin de comprendre d'où provient cette incertitude, et qu'est-ce qui est possible de faire avec ces composantes. La partie algorithmique du cours traitera de la locomotion, la localisation, la navigation, l'exploration, la cartographie de l'environnement et l'estimation d'état par des filtres (à particules, Kalman, Kalman étendu). Nous aborderons aussi la problématique du SLAM (Simultaneous Localization and Mapping) et sa composante essentielle de fermeture de boucles. Nous mettrons l'accent sur la robustesse de ces algorithmes, c'est-à-dire leur capacité de fonctionner malgré la présence d'erreurs aberrantes.
L'essentiel de la programmation du cours se fera avec matlab ou Python, afin de rendre le cours accessible à tous les programmes d'études. Dans les plate-formes robotiques utilisées dans le cours, toute l'information des capteurs sera accessible à partir de Python, avec des timestamps (données horodatées). Vous ne devriez donc pas consacrer trop de temps à l'intégration du système, pour plutôt faire de la fusion d'information entre capteurs et dans le temps.
Plus les plus courageux, vous pouvez aussi programmer les robots directement avec ROS, en utilisant le langage C++ ou Python.
Depuis 2012, nous utilisons de vrais robots mobiles et capteurs! Depuis 2016, nous utilisons les plate-formes (Kobuki). Pour les curieux, la documentation du robot par port USB est disponible ici. Ceci vous donne une idée des capacités de cette plateforme.

Ce robot est équipée des capteurs suivants ou disponible à l'occasion (*):
Le matériel vu en classe servira à l’utilisation et l'interprétation des signaux de ces capteurs. En particulier, les capteurs infrarouges vous permettrons de mieux assimiler les concepts de bruit, de fonction de capteur, et de linéarisation. Et comme ils retournent parfois des données aberrantes, ils seront un excellent cas pour justifier l'utilisation de méthodes robustes!
Travaux
Pour les étudiants de 2ème cycle, les travaux doivent être rédigé obligatoirement avec le traitement de texte LaTex. Les utilisateurs des plate-formes Windows pourront utiliser le gratuiciel miktek, disponible ici. Les utilisateurs de Mac OS X peuvent se référer ici. Il existe aussi des sites webs pour l'édition en ligne (incluant l'aspect collaboratif), tels qu'Overleaf ou ShareLatex.
Matlab et Miktex sont aussi disponibles au laboratoire d'informatique.
Horaire des leçons
2 Séances de laboratoire du vendredi:
#1 8h30 à 10h20 au PLT-3920
#2 10h30 à 12h20 au PLT-3920
Le code des laboratoires est disponible ici : https://github.com/davidlandry93/glo4001.
Anciens laboratoires
Code pour marqueurs fiduciaires
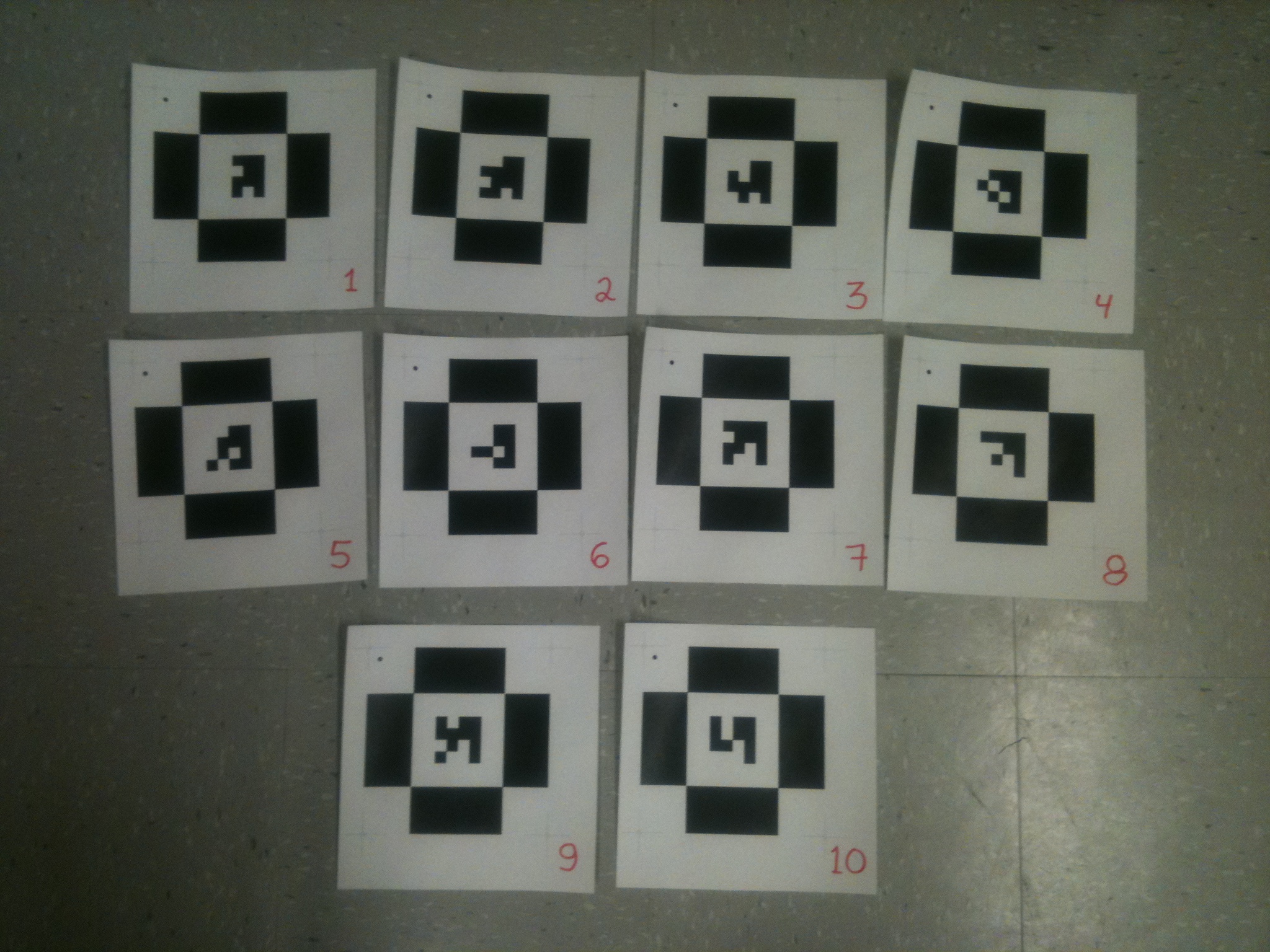
Ces bouts de code sont fournis sans grand support de ma part. Ils vont vous permettre d'extraire la position de marqueurs fiduciaires, tel qu'illustré ici :
Ce code est fourni "as is". Si vous pouvez l'améliorer,
n'hésitez pas! Il est tiré en parti du site http://www.cs.ubc.ca/nest/imager/tr/2010/Atcheson_VMV2010_CALTag/.
Travaux et projets
Voici des exemples de projets possibles pour le cours :
Liens utiles
Livre de référence
Computational Principles of Mobile Robotics 2nd edition, par Gregory Dudek et Michael Jenkin.
Introduction to Autonomous Mobile Robots, 2nd edition, par Roland Siegwart, Illah R. Nourbakhsh et Davide Scaramuzza. MIT Press.
Conférences et journaux en robotique
Pour les curieux, ou ceux en quête d'inspiration pour des idées de projets!
Conférences
Robotics: Science and Systems (RSS)
IEEE International Conference on Robotics and Automation (ICRA)
IEEE International Conference on Intelligent Robots and Systems (IROS)
Conference on Computer Robot and Vision (CRV)
Journaux
IEEE Transactions on Robotics
Autonomous Robots
International Journal of Robotics Research
Journal of Field Robotics
IEEE Robotics and Automation Magazine
Robotics and Autonomous Systems
Ce cours offre un aperçu des principes généraux de la robotique mobile ainsi qu'un tour d'horizon des principaux défis. La pierre angulaire du cours sera le traitement de l'information captée en tenant compte de l'incertitude, afin d'avoir une abstraction du robot et de son environnement adaptée à la tâche à effectuer. Les composantes de bases utilisés en robotique mobile, tels que les actionneurs et les capteurs (sonar, laser, caméras, et centrale inertielle), seront présentées afin de comprendre d'où provient cette incertitude, et qu'est-ce qui est possible de faire avec ces composantes. La partie algorithmique du cours traitera de la locomotion, la localisation, la navigation, l'exploration, la cartographie de l'environnement et l'estimation d'état par des filtres (à particules, Kalman, Kalman étendu). Nous aborderons aussi la problématique du SLAM (Simultaneous Localization and Mapping) et sa composante essentielle de fermeture de boucles. Nous mettrons l'accent sur la robustesse de ces algorithmes, c'est-à-dire leur capacité de fonctionner malgré la présence d'erreurs aberrantes.
L'essentiel de la programmation du cours se fera avec matlab ou Python, afin de rendre le cours accessible à tous les programmes d'études. Dans les plate-formes robotiques utilisées dans le cours, toute l'information des capteurs sera accessible à partir de Python, avec des timestamps (données horodatées). Vous ne devriez donc pas consacrer trop de temps à l'intégration du système, pour plutôt faire de la fusion d'information entre capteurs et dans le temps.
Plus les plus courageux, vous pouvez aussi programmer les robots directement avec ROS, en utilisant le langage C++ ou Python.
Depuis 2012, nous utilisons de vrais robots mobiles et capteurs! Depuis 2016, nous utilisons les plate-formes (Kobuki). Pour les curieux, la documentation du robot par port USB est disponible ici. Ceci vous donne une idée des capacités de cette plateforme.
| Capteur |
Modèle |
| Distance (par infrarouge) |
GP2Y0A21YKet GP2Y0A02YK0F |
| Gyroscope trois axes |
Interne au robot |
| Odométrie |
Interne au robot 11.7 impulsions/mm |
| Caméra
2D+3D |
Microsoft
Kinect v1 pour XBOX |
| 4
convertisseurs analogue-numérique |
12
bit, 0-3.3 V, 50 Hz Interne au robot |
| Télémètre
laser* |
URG-04LX-UG01 |
Le matériel vu en classe servira à l’utilisation et l'interprétation des signaux de ces capteurs. En particulier, les capteurs infrarouges vous permettrons de mieux assimiler les concepts de bruit, de fonction de capteur, et de linéarisation. Et comme ils retournent parfois des données aberrantes, ils seront un excellent cas pour justifier l'utilisation de méthodes robustes!
Travaux
Pour les étudiants de 2ème cycle, les travaux doivent être rédigé obligatoirement avec le traitement de texte LaTex. Les utilisateurs des plate-formes Windows pourront utiliser le gratuiciel miktek, disponible ici. Les utilisateurs de Mac OS X peuvent se référer ici. Il existe aussi des sites webs pour l'édition en ligne (incluant l'aspect collaboratif), tels qu'Overleaf ou ShareLatex.
Matlab et Miktex sont aussi disponibles au laboratoire d'informatique.
| Description |
Fichiers |
| Travail Pratique 1 (Équipe 1 ou 2) | Version
complète TP1Complet.zip |
| Travail
Pratique 2 (Équipe 1 ou
2) |
TP2.zip |
| Remise
du projet |
Instruction
pour le rapport et pour l'évaluation ici. Template latex pour GLO-7021 : rapportglo7021.zip |
Horaire des leçons
2 Séances de laboratoire du vendredi:
#1 8h30 à 10h20 au PLT-3920
#2 10h30 à 12h20 au PLT-3920
Le code des laboratoires est disponible ici : https://github.com/davidlandry93/glo4001.
| Sem # |
Date |
Sujets ______________________________ |
Acétates |
Lectures
suggérées (Comp. Princ. of Mobile Robotics) |
Lectures suggérées
_________________________________(Autonomous Mobile Robots) |
Code
matlab |
Laboratoire du vendredi ____________________________ |
| 1 |
5 Sep |
• Résumé
du cours • Historique • Révision très rapide des concepts mathématiques tels que trigonométrie, algèbre linéaire |
01-PlanCoursHistoMath.pdf |
Chapitre 1 du manuel |
Chapitre 1 |
Installation des logiciels sur les
laptops. Connexion et utilisation de la plate-forme robotique. |
|
| 2 |
12
Sep |
• Capteurs :
tactile, sonar, accéléromètre, gyroscopes, centrales
inertielles. • Nappes lasers (LiDAR) 2D, 3D |
02-Capteurs.pdf Cahier d'exercices Son solutionnaire ellipse.m plotEllipse.py |
Chapitre
4 du manuel, jusqu'à la section 4.9 |
Chapitre 4: p.101 à 137
|
Labo
1 Calibration et utilisation du capteur infrarouge. |
|
| 3 |
19
Sep |
• Coordonnées homogènes
• Capteurs vision • Caméra temps-de-vol • Localisation par trilatération • Modèle probabiliste des capteurs • Modèle sténopé de la caméra |
RandomWalk.m 03-VisionI.pdf |
Chapitre 5 : p.123 à 128, section 5.5.5. |
Caméra: p.142 à 159 Stéréo: 169 à 179 |
Labo 2 Calibration et utilisation du gyroscope à taux. Création d'une carte 2D. |
|
| 4 |
26
Sep |
• Vision
stéréo • Problème de correspondance • Capteur visuels actifs : Microsoft Kinect 1 et 2, pmdtech. • Notion de features comme point de repère.
• Détecteurs de coin Harris, FAST |
03-VisionSupplement.pdf 03-VisionII.pdf |
VideoLocalisation Même vidéo, mais sur youtube. Pour ceux qui veulent un rafraîchissement sur les distributions normales Article sur SIFT RANSAC |
Kinect: p. 137-139 Odométrie visuelle: p 187-188 Features visuels: p. 209-234 |
HarrisExample.m Shakey.jpg |
Labo 3 Laboratoire sur la caméra RGB. |
| 5 |
3 Oct |
• Feature visuels :
- SIFT - SURF - BRIEF (binaire) - ORB • Algorithme RANSAC • Odométrie visuelle • Transformations homogènes
|
03-VisionIII.pdf 04.StatistiquesProbaBayesI.pdf |
RANSAC: p. 252-255. | Labo 4 Modèle de déplacement du robot |
||
| 6 |
10
Oct |
• Probabilités
• Modèles probabilistes des capteurs
• Règle de Bayes• Locomotion à roues |
04.StatistiquesProbaBayesII.pdf 05-LocomotionI.pdf Optionnel (pour mieux comprendre la convolution en probabilité) : Chapter7_SumOfProbabilities.pdf |
Appendice A du manuel
Chapitre 2 : tout sauf section
2.1
Chapitre 3 : lecture p.31, Section 3.1.5 et 3.1.6 |
Probabilités : p.296-306 Véhicules à roue Section 2.3 Chapitre 3: 57-63, |
ExempleDiffDriveSansBruit.m | Labo 5 Utilisation de la Kinect et application pratique de RANSAC |
| 7 |
17
Oct |
• Modèle probabiliste
des déplacements • Navigation à l'aveugle • Contenu de l'examen |
05-LocomotionII.pdf |
(à compléter) Chapitre 8 : du début jusqu’à la section 8.2 (8.2 non-incluse). |
(à compléter) |
|
Pas de laboratoire |
| 8 |
24
Oct |
Examen mi-session
(les numéros de pages sont TOUJOURS
inclusifs).
Contenu à venir
|
Exemples de questions tirées de l'examen 2010 (un peu plus facile que 2011) Solutionnaire 2ème série d'exercices et ses solutions. Quelques détails sur solution Prelude Exercice pour RANSAC Exercise de transformation Guide d'étude : GuideDetudeMiSession2016.pdf Version préliminaire de la feuille d'aide incluse dans l'examen |
||||
| 9 |
31
Oct |
Semaine de lecture |
Pas de laboratoire |
||||
| 10 |
7 Nov |
• Fusion de capteurs • Estimation d'état • Filtrage récursif • Filtre Kalman |
07-EstimationEtat-A.pdf |
Section
4.9 : p.102-114 kalman_intro.pdf Quelques exemples de filtres Kalman expliqués, avec le code dans ExemplesKalmanDoc.zip. |
Types de localisation: p. 306 Localisation probabiliste: p307-342 |
MoyenneRecursive.m FiltreKalman.m FiltreKalmanGyroCompas.m FiltreKalmanNonLineaire.m |
Retour sur l'examen, de 10h30 à 12h. Optionnel |
| 11 |
14
Nov |
•
Linéarisation avec Jacobienne • Filtre Kalman Étendu (EKF) • Filtre Kalman non-parfumé (UKF) |
07-EstimationEtatB.pdf 08-FiltreParticule-A.pdf |
FiltreKalmanNonLinPseudoGPS.m |
|
Labo
6 Filtre de Kalman codeKalman.zip |
|
| 12 |
21
Nov |
• Filtres à
particules (si temps permet) • Méthode Iterative Closest Point (ICP) • Espace de configuration • Graphes de visibilité |
08-FiltreParticuleICP-B.pdf 10-PlanifA.pdf |
||||
| 13 |
28
Nov |
•
Planification : - champs de potentiels - RRT • Cartographie SLAM : - Description et taxonomie • Problème de loop closure • EKF SLAM • Méthodes dense vs. à features • Visual Place Recognition • |
10-PlanifB.pdf 09-SLAM.pdf Section SLAM du Handbook of robotics, pages 1153-1176 , disponible à partir des ordinateurs de l'Université Laval via ce lien. ou celui-ci SLAM course de Cyrill Stachniss EKF-SLAM Vidéo d'une demo EKF matlab |
Section
8-8.1 (p. 240-249) Section 8.3 (p. 250-260) Section 9.2.2 (p.283-287) |
SLAM : p. 348-356, 359-365. Reconnaissance de lieu: 234-242 |
EKFSlam.2.zip FastSLAM.zip |
Présentations orales 2ème cycle 8h30-12h30 |
| 14 |
5 Dec |
• FastSLAM 1.0
• Graph-SLAM • Grille d'occupation par SONAR • Représentation de l'espace: - cartes métriques - cartes topologiques - cartes topométriques (hybride) |
|
Chapitre 6 du manuel Chapitre 9, p. 276-282 |
Représentation carte: p. 284-297. Split and merge: p.249-250 |
OccupancyGrid.zip CarteMonde.zip |
Pas de labo |
| 15 | 12 Dec |
Examen
final |
GuideDetudeFinal2016.pdf ExemplesExamenFinal.pdf Solutionnaire partiel Deuxième partie du solutionnaire. Feuille d'aide (cheat sheet) |
||||
{kind=link}
Anciens laboratoires
- Drivers pour les lasers Hokuyo URG-04LX-UG01 sur Windows
- Fichier à placer dans C:\Windows\inf : URG_USB_Driver.inf
- Programme avec GUI pour lire les données du Hokuyo : UrgBenriSetup_1.1.11.exe
- Drivers Windows pour le convertisseur analogue/numérique disponible ici.
- Le logiciel de capture de données WinDaq est ici. et ses
manuel
d’instruction. Après installation, il sera dans le
répertoire C:\Dataq. Double clique sur
HardwareManager.exe pour le démarrer. Faire right/left click
pour zoomer sur la partie gauche d'un channel.
Code pour marqueurs fiduciaires
Ces bouts de code sont fournis sans grand support de ma part. Ils vont vous permettre d'extraire la position de marqueurs fiduciaires, tel qu'illustré ici :
 |
 |
- Code matlab Caltag nécessaire
- Code hacké et 10 tags en format postscipts : CaltagHack_4001_7021.zip
Travaux et projets
Voici des exemples de projets possibles pour le cours :
- Créer et utiliser une carte des graffitis dans les tunnels pour faire l'orientation et la localisation d'un robot mobile.
- Faire un robot "démineur" qui localise des objets métalliques au sol. Le robot devra faire un balayage complet d'un endroit pré-déterminé.
- Utiliser les distorsions de champs magnétiques pour
localiser un robot dans un édifice.
- Utiliser des sondes tactiles pour naviguer un environnement.
- Utilisation des caméras pour naviguer l’environnement.
- Pousser un objet vers une position connue.
- Conduire manuellement le robot sur une trajectoire, puis
utiliser des repères visuels (SIFT) pour refaire cette même
trajectoire à l'envers.
- Développer un algorithme d'apprentissage automatique (reinforcement learning, par exemple) pour faire apprendre la nage à un robot à palmes .
- Navigation avec évitement d'obstacle pour une Kinect montée sur le robot.
- Application des RTT avec trajectoires courbes pour minimiser le temps de parcours des corridors.
- Faire du SLAM pour faire la carte du 3ème étage du Pouliot.
- Faire un robot qui peut livrer du courrier aux
professeurs. Vous aurez besoin d'une carte du Pouliot, et
vous devrez être capable de lire les noms affichés sur les
portes des bureaux. Heureusement, les plaques des noms des
professeurs sont à une hauteur accessible par la caméra du
robot.
- Apprendre comment l'apparence d'un objet change selon le
point de vue. En contrôlant la position de la caméra, i.e.
le robot, on peut donc faire de l'active learning.
- Amélioration d'algorithmes déjà existants, et tests en simulation.
- Modification et ajouts de modules ROS (Robot Operating System)
compatible avec l'environnement Logico.
- Test et démonstration de openSLAM avec le robot fournis.
- Faire un programme d'autocalibration qui permet
d'identifier automatiquement la position de la caméras sur
le robot mobile. L'idée est de regarder comment des points
de repères visuels dans l'environnement changent, en
fonction de commandes de déplacement du robot.
Liens utiles
- Voici un guide simplifié de Matlab produit par Hoang Le-Huy, du département de Génie Électrique.
- Pour bien comprendre ce qui se passe quand on additionne des variables aléatoires (en par la bande qu'est-ce qu'une convolution), voici un chapitre d'un livre de statistique : Chapter7_SumOfProbabilities.pdf .
Livre de référence
Computational Principles of Mobile Robotics 2nd edition, par Gregory Dudek et Michael Jenkin.
Introduction to Autonomous Mobile Robots, 2nd edition, par Roland Siegwart, Illah R. Nourbakhsh et Davide Scaramuzza. MIT Press.
Conférences et journaux en robotique
Pour les curieux, ou ceux en quête d'inspiration pour des idées de projets!
Conférences
Robotics: Science and Systems (RSS)
IEEE International Conference on Robotics and Automation (ICRA)
IEEE International Conference on Intelligent Robots and Systems (IROS)
Conference on Computer Robot and Vision (CRV)
Journaux
IEEE Transactions on Robotics
Autonomous Robots
International Journal of Robotics Research
Journal of Field Robotics
IEEE Robotics and Automation Magazine
Robotics and Autonomous Systems