|
Perception
artificielle
La perception
artificielle consiste à interpréter les données
provenant de divers capteurs. Elle s'appuie souvent
sur des méthodes avancées de fusion de capteurs, afin
de combiner diverses modalités sensorielles. Par
exemple, il est possible de combiner des informations
visuelles (caméra) et volumétriques (laser) afin
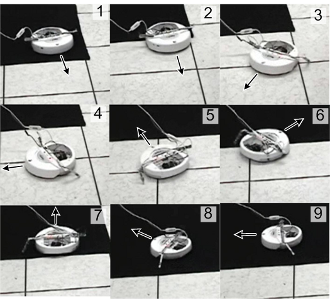
d'améliorer la reconnaissance des objets. Un de nos
projets consiste à développer de capteurs tactiles,
utilisable en robotique mobile. Ces capteurs tactiles
peuvent reconnaître différentes surfaces, grâce à
l'utilisation de concept comme la signature des
signaux propre à chaque texture physique. Pour plus
d'information, consulter les pages suivantes : reconnaissance de terrain
ou perception tactile (en
anglais).
|
 |
 |
L'apprentissage
non-supervisé permet à un système d'apprendre de
lui-même, en minimisant l'intervention humaine. Par
contraste, les méthodes d'apprentissages supervisées
exigent la présence d'un "professeur" qui guide le
système. J'applique ces méthodes pour des problèmes de
classification en perception artificielle, par exemple
l'identification des types de surfaces (terrains,
sols, planchers, matériaux), pour des robots
mobiles dotés de
capteurs visuels, tactiles, proprioceptifs
ou inertiels.
|
|
Robotique en milieu
arctique
L'exploration du
territoire arctique présente de nombreux défis pour la
robotique mobile, tel que l'éloignement et les
conditions climatiques rudes. Aussi, les surfaces
escarpées et enneigées limitent les possibilités de
déplacement pour les véhicules muent par roues. De ce
fait, les robots se déplaçant à l'aide de pattes
permettraient d'étendre les endroits accessibles pour
ces véhicules autonomes. L'objectif de ce projet de
recherche serait de combiner des stratégies
d'exploration du territoire avec des plateformes
robotiques mobiles à pattes.
|
Axel Heiberg,
Extrême-Arctique
 |
|
Barbade
 |
Robotique
sous-marine
Le robot Aqua, projet
conjoint entre l'Université
McGill et York University, est un robot
amphibie à pattes. Sous l'eau, le robot se déplace à
l'aide de six nageoires, lui conférant une agilité
exceptionnelle. Le robot est équipé de deux
ordinateurs, de caméras. Le but de ce projet est
d'automatiser la surveillance en mer, par exemple
pour dresser une carte en 3D de récifs de corail.
Pour plus de détails sur le projet, consultez le site www.aquarobot.net. |